技術摘要: 技術摘要: |
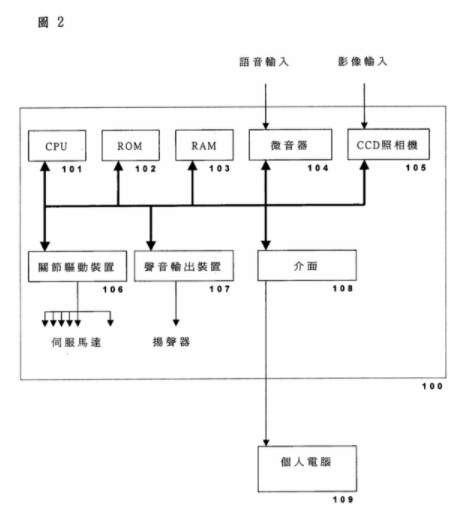
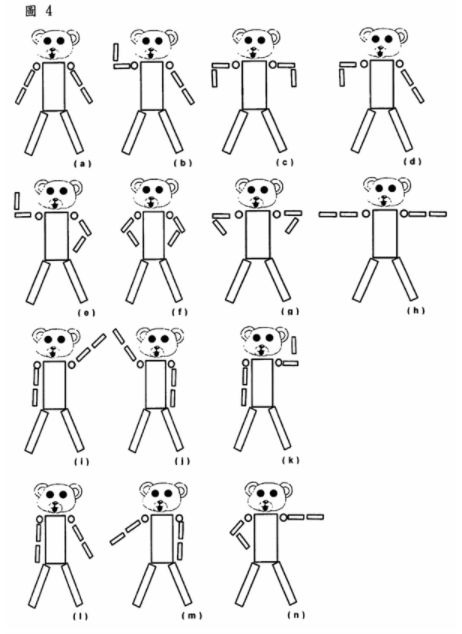
本發明之領袖領導機器人系統係利用語音輸入裝置與影像輸入裝置記錄孩童於表演時的語音與姿態,並藉由姿勢辨識裝置,將上述影像輸入裝置所攝影的影像、與儲存於上述基礎姿勢記憶裝置的各個基礎姿勢進行比對,而辨識出上述輸入影像所屬的基本姿勢。同時,並利用姿勢處理裝置,將上述姿勢辨識裝置所辨識出的基本姿勢,賦予與該影像輸入時間的對應關係後,依該輸入時間之順序而排列各個基本姿勢。而在進行重新播放時,透過語音輸出裝置與動作輸出裝置,能夠使領袖領導機器人系統在相對應的時間模仿孩童當時的姿態。
|
| 解決的問題或達成的功效: |
本發明係關於一種能記錄孩童於表演時的語音與姿態,並於重新播放時,在對應的時間點由機器人模仿孩童當時的姿態的領袖領導機器人系統、其控制方法其控制方法、電腦程式產品與電腦可讀取記錄媒體。
|
| 應用領域: |
領袖領導機器人系統
|
| 適用產品: |
機器人
|
| IPC: |
G09B-005/06(2006.01);G09B-025/02(2006.01);G09B-019/00(2006.01)
|
| Claim 1: |
1.一種領袖領導機器人系統,該系統包括:語音輸入裝置,對使用者表演時的語音進行錄音;影像輸入裝置,對上述使用者表演時的影像進行攝影;基礎姿勢記憶裝置,儲存多個基礎姿勢;姿勢辨識裝置,將上述影像輸入裝置所攝影的影像、與儲存於上述基礎姿勢記憶裝置的各個基礎姿勢進行比對,而辨識出上述輸入影像所屬的基本姿勢;姿勢處理裝置,將上述姿勢辨識裝置所辨識出的基本姿勢,賦予與該影像輸入時間的對應關係後,依該輸入時間之順序而排列各個基本姿勢;語音輸出裝置,播放上述聲音輸入裝置所錄音之語音;以及動作輸出裝置,根據上述姿勢處理裝置所得到之基本姿勢與其對應之輸入時間,於上述語音輸出裝置播放錄音之語音時,在該相對應的時間使該領袖領導機器人系統做出該基本姿勢。
|
| 相關圖片: |
|
|
| 聯繫方式 |
|
| |